|
I worked as an autonomy engineer at Skydio from 2022 to 2024. I graduated with a PhD in computer science from Princeton University in 2022. I was advised by Jia Deng and a member of the Princeton Vision and Learning Lab. My work focuses on combining multiview geometry with deep learning. Some of my favorite topics include optical flow and simultaneous localization and mapping (SLAM). In 2022, I placed 2nd in the US Beer Mile National Championships and went on to compete in the World Championships. zachteed[at]gmail[dot]com |

|
|
|
|
Zachary Teed*, Lahav Lipson*, and Jia Deng NeurIPS, 2023 paper / code |
|
Zachary Teed and Jia Deng NeurIPS, 2021 paper / code |
|
Zachary Teed and Jia Deng CVPR, 2021 paper / code |
|
Zachary Teed and Jia Deng CVPR, 2021 paper / code |
|
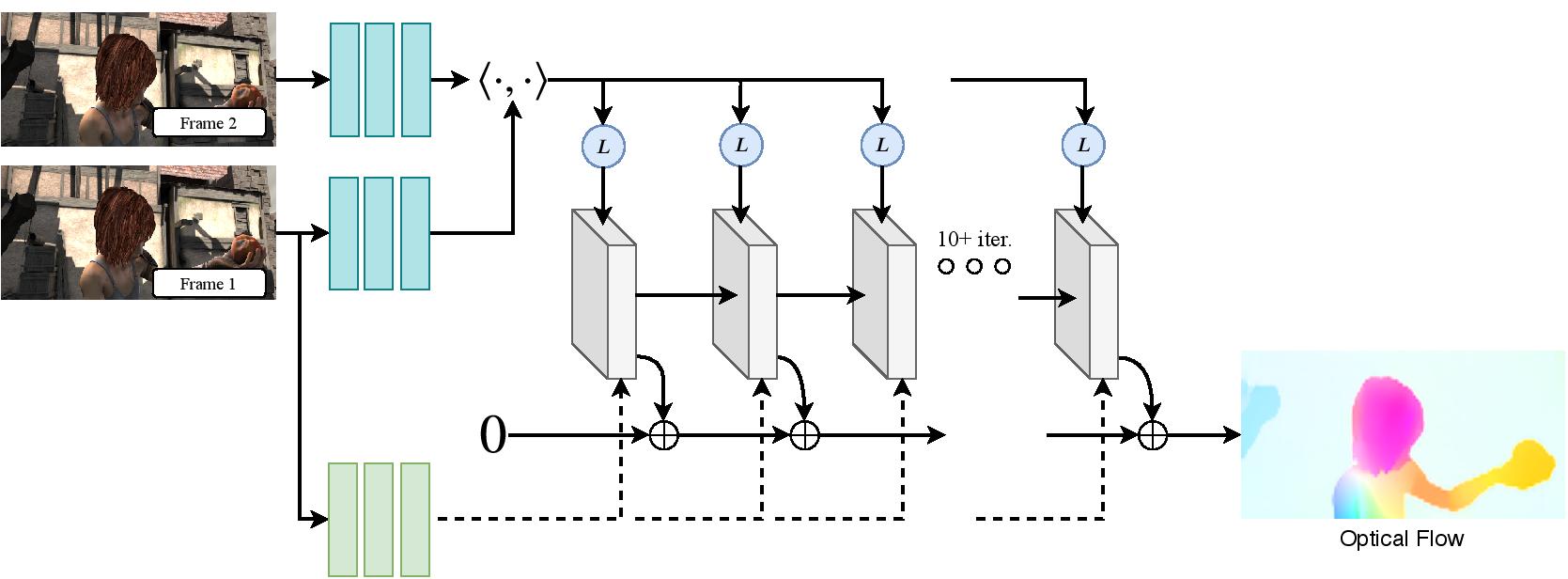
Zachary Teed and Jia Deng ECCV 2020 Best Paper Award paper / code |
|
Zachary Teed and Jia Deng ICLR, 2020 paper / code |
|
Zachary Teed and Jonathan Silva MethodsX, 2016 code |